





{kind=link}
[ perfil de distribuidor ]
We use cookies to optimize our website for you and to be able to continuously improve it. By continuing to browse the site you are agreeing to our use of cookies.
Disagree
/
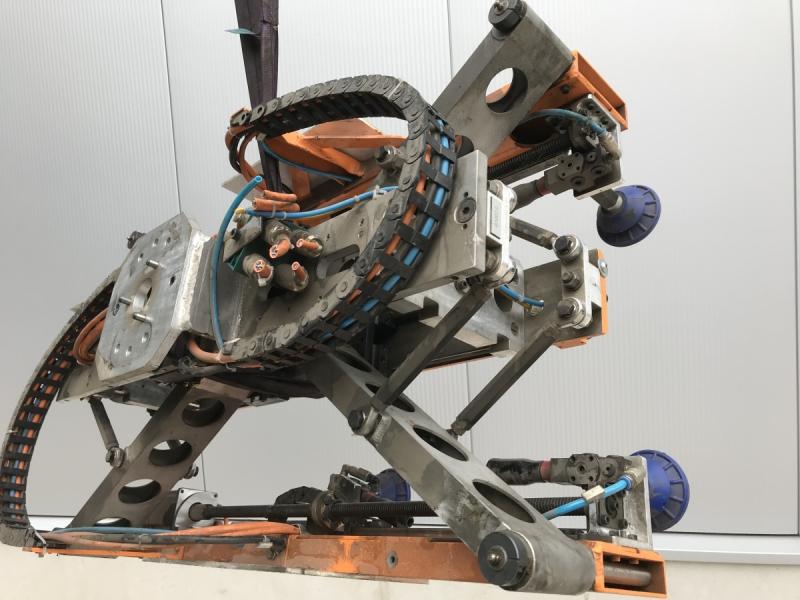
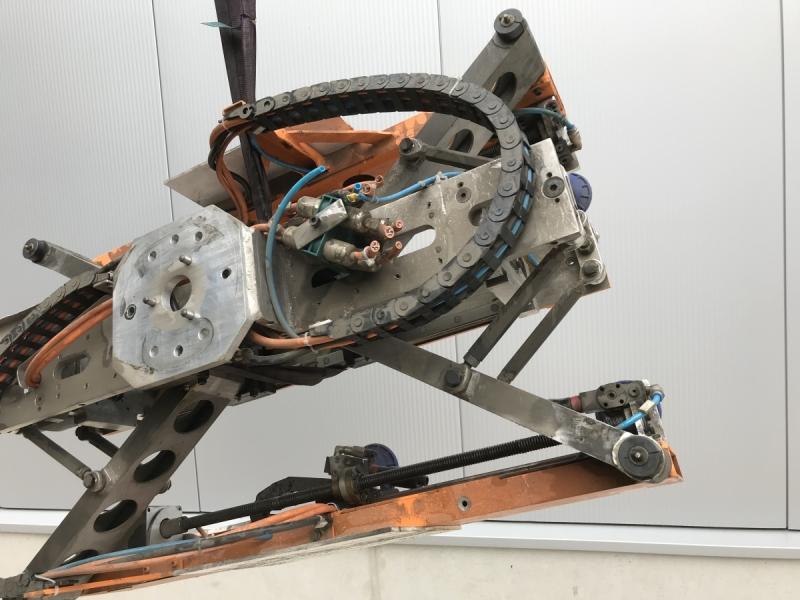
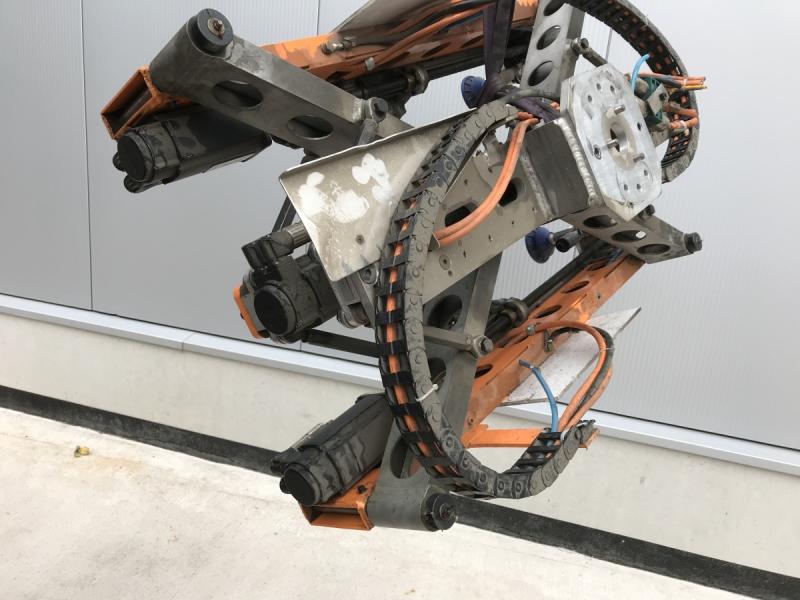
Fabricante: PIAB
Modelo:
Tipo de máquina: Dispositivo de elevación por vacío, elevador por vacío hecho a medida al
Número de artículo: 167536704
Cantidad: 1
Fecha: 23.06.2026
Año de fabricación: 2008
Ubicación: 37235 Hessisch Lichtenau
Precio: 1,000 EUR
Seller-item-No.:57987